Using VxWorks 7 VxBus Device-Specific Parameters
Embedded driver development frequently involves balancing flexibility, portability, and boot-time efficiency across multiple hardware configurations. Hard-coded driver parameters may work well during initial bring-up, but they often become problematic as systems evolve and new peripherals are introduced.
VxWorks 7 addresses this challenge through VxBus device-specific parameters, allowing driver behavior to be customized dynamically using device tree configuration rather than static source modifications.
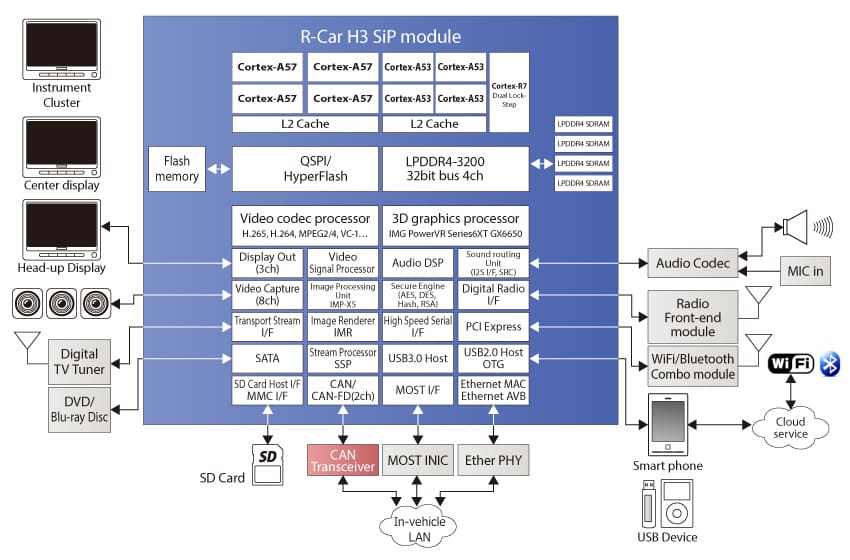
This article explores how device-specific parameters can be used to improve driver flexibility using a practical PCI Express example from a VxWorks 7 BSP developed for the Renesas R-Car H3 platform.
⚙️ The Original BSP Environment #
The BSP targeted the Renesas R-Car H3 SIP evaluation board and included drivers for several major SoC peripherals:
- Serial interfaces
- Ethernet controllers
- MMC storage
- I2C buses
- GPIO controllers
- PCI Express
As part of PCIe validation, an Intel i210 PCIe Ethernet adapter was connected to the board’s PCIe slot.
The validation process confirmed:
- PCIe link establishment
- Endpoint enumeration
- VxBus device discovery
- Network stack integration
The i210 adapter successfully appeared as a secondary Ethernet interface on the system.
At this stage, the PCIe controller driver appeared stable.
🧩 The Real-World Problem #
The BSP was later deployed across multiple engineering teams working in different locations and using different PCIe peripherals.
One team reported a failure involving a PCIe CAN controller card.
Symptoms included:
- PCIe endpoint not detected
- Link training failures
- Device initialization timeouts
Investigation revealed the root cause:
The PCIe root complex driver used a hard-coded link establishment timeout of:
1 ms
This was sufficient for the Intel i210 card but insufficient for the CAN controller hardware, which required up to:
5 ms
to establish the PCIe link reliably.
🚫 Why Hard-Coding Was the Wrong Solution #
The simplest fix would have been increasing the timeout globally.
However, this introduced a tradeoff.
If no PCIe endpoint device was installed:
- The driver would still wait unnecessarily
- System boot time would increase
- All deployments would incur the penalty
For embedded systems, particularly those with strict startup requirements, unnecessary delays are undesirable.
The better solution was making the timeout configurable per target system.
🔧 Converting the Timeout into a VxBus Parameter #
The first step was converting the hard-coded timeout into a VxBus device-specific parameter.
A parameter table was added to the driver:
LOCAL VXB_PARAMS rcarH3PcieParams[] =
{
{ DLLACT_TIMEOUT_PARAM, VXB_PARAM_INT32, { (void *)DLLACT_TIMEOUT_US } },
{ NULL, VXB_PARAM_END_OF_LIST, { NULL } }
};
This table defines:
- Parameter name
- Parameter type
- Default value
The driver now had a configurable timeout rather than relying on a fixed compile-time constant.
🚌 Enabling Parameter Support in the Driver #
Next, the VxBus driver definition was updated to advertise parameter support.
This was done using:
VXB_DRVFLAG_PARAM
Example:
VXB_DRV vxbFdtRcarH3PcieDrv =
{
{ NULL },
RCAR_H3_PCIE_DRV_NAME,
"Renesas R-Car H3 PCIe driver",
VXB_BUSID_FDT,
VXB_DRVFLAG_PARAM,
0,
rcarH3PcieMethodList,
rcarH3PcieParams
};
This flag tells the VxBus framework that the driver supports configurable runtime parameters.
📥 Retrieving Parameters During Driver Initialization #
The driver initialization logic was then updated to retrieve the parameter dynamically:
if (vxbParamGet (pDev,
DLLACT_TIMEOUT_PARAM,
VXB_PARAM_INT32,
¶m) == OK)
{
dllActTimeoutUs = (unsigned)param.int32Val;
}
If the parameter was unavailable, the driver fell back to its default value.
This mechanism allows:
- Sensible default behavior
- Optional board-specific overrides
- Runtime flexibility without source changes
The resulting implementation became substantially more portable across hardware variants.
🌲 Overriding Parameters from the Device Tree #
The final step involved overriding the parameter using the device tree.
VxWorks 7 supports driver parameter overrides inside the chosen node using a devparam section.
General structure:
chosen {
devparam {
<device>@<unit> {
<parameter> = <value>;
};
};
};
This mechanism allows platform-specific driver tuning without modifying driver source code.
🛠️ PCIe Timeout Override Example #
The R-Car H3 device tree was updated to increase the PCIe DLL activation timeout:
chosen
{
devparam
{
renesas,rcar-h3-pcie@0
{
dllActTimeoutUs = <5000>;
};
};
};
This changed the timeout from:
1000 us
to:
5000 us
for that specific hardware configuration.
No driver recompilation was required.
🧪 Debug Output and Validation #
With no PCIe card installed, the driver produced:
rcarH3PcieHwInit: pDev 0xffff80000011f980:
PCIe DLL not ready after 5000us
This confirmed:
- The parameter override was applied
- The driver used the new timeout value
- Device-tree configuration successfully influenced runtime behavior
The engineering team using the CAN controller could now tune the timeout independently for their deployment.
🚀 Why Device-Specific Parameters Matter #
Device-specific parameters provide several major advantages in embedded systems development.
Flexible Hardware Support #
Different boards and peripherals often require:
- Different timing constraints
- Alternative initialization sequences
- Hardware-specific tuning
Device parameters allow a single driver binary to support multiple deployment scenarios.
Reduced Source Modifications #
Without configurable parameters, teams frequently:
- Fork drivers
- Introduce board-specific patches
- Create maintenance fragmentation
Parameterization reduces long-term maintenance overhead.
Faster BSP Scalability #
As BSPs expand across:
- Multiple boards
- Multiple customers
- Multiple peripherals
device-specific tuning becomes increasingly important.
Cleaner Separation of Policy and Mechanism #
The driver provides:
- Mechanism
while the device tree provides:
- Policy
This separation is a core principle of modern embedded platform design.
🧠 VxBus and Modern Embedded Driver Architecture #
VxBus provides a modular driver framework designed to support scalable BSP development across modern SoCs and heterogeneous hardware environments.
Capabilities include:
- Device tree integration
- Runtime parameterization
- Dynamic driver discovery
- Layered bus management
- Platform abstraction
As embedded systems continue to grow more configurable and modular, runtime tunability becomes increasingly valuable.
Device-specific parameters are a small but powerful feature that can dramatically improve BSP portability, maintainability, and deployment flexibility.
📚 References #
- VxWorks 7 BSP and Driver Development Guide
- VxBus Driver Framework Documentation
- Wind River Device Tree Integration Documentation
- PCI Express Base Specification
- Renesas R-Car H3 Technical Documentation