VxWorks 7.0下基于VxBus的定时器子系统
最近研究了一下VxWorks 7.0下基于vxbus的定时器子系统,方便我们在需要使用定时器中断的时候引用,开发过程中的一点体会记录下来,如果由理解不对或者不全面的望批评指正,谢谢。
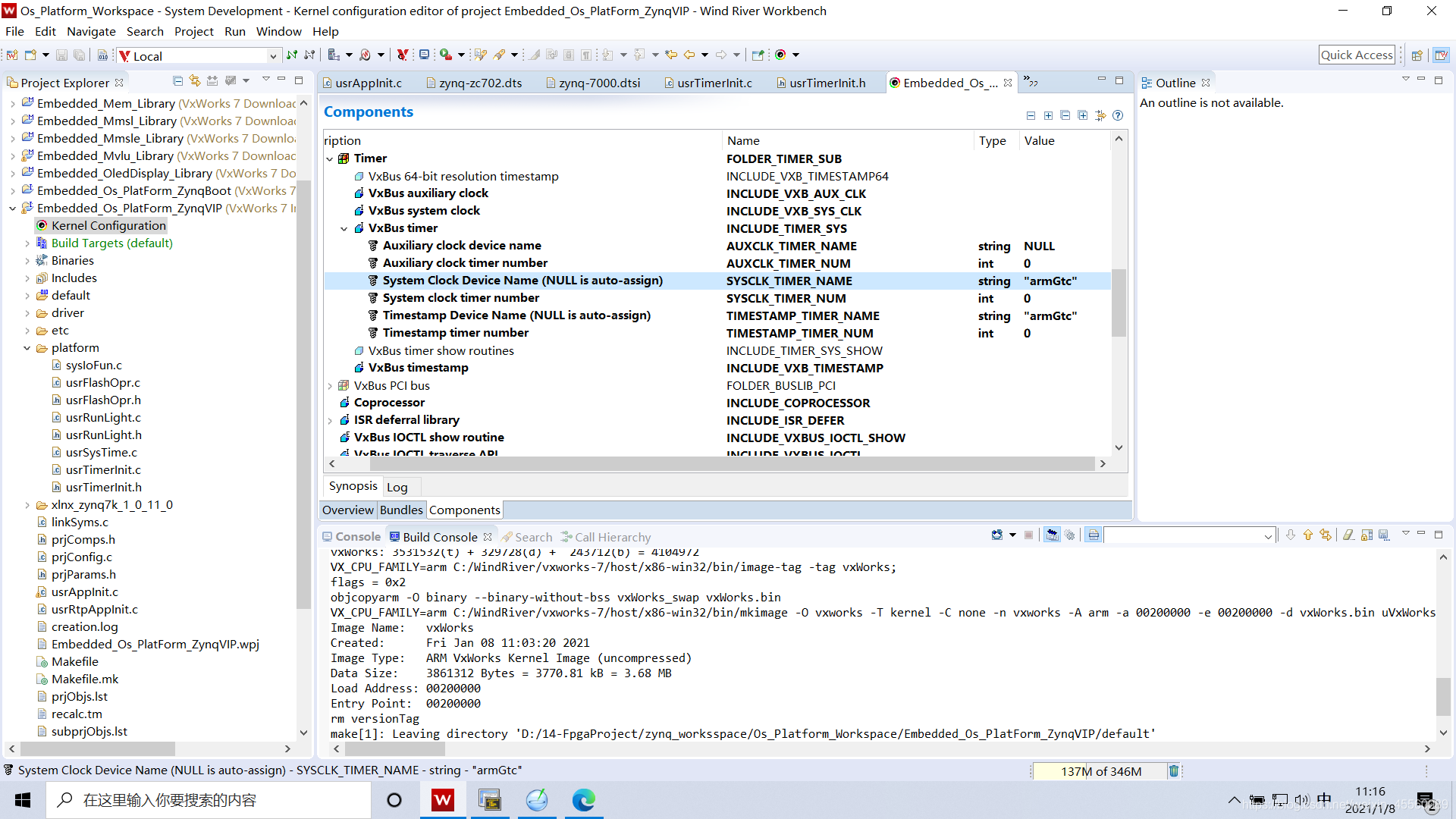
开发平台为zynq7Z020,该处理器由三个全局的定时器,分别是globaltimer,ttc_0,ttc_1,其中全局定时器用作系统的脉搏,是整个操作系统的ticks定时器,其可通过内核配置完成,具体如下:
而ttc_0会作为系统的AUX clock在初始化的时候完成匹配,系统使用SPY命令时启用定时器,所以,如果要使用TTC0作为应用,要考虑spy调试对其影响,TTC_1可以作为用户自定义定时器使用,挂接用户中断服务例程。其设备树配置如下:
globaltimer: globaltimer@f8f00200
{
compatible = "arm,cortex-a9-gtc";
reg = ;
clock-frequency = ;
interrupts = ;
interrupt-parent = <&intc>;
};
ttc_0: ps7-ttc@f8001000
{
compatible = "xlnx,zynq7k-ttc";
reg = ;
clock-frequency = ;
interrupt-parent = <&intc>;
interrupts = ;
};
ttc_1: ps7-ttc@f8002000
{
compatible = "xlnx,zynq7k-ttc";
reg = ;
clock-frequency = ;
interrupt-parent = <&intc>;
interrupts = ;
};
系统在对vxbus子系统初始化时调用每个驱动的fdtZynqTimerAttach函数,在这个函数中对定时器进行初始化相关操作,同时挂接几个重要的回调函数
pTimerFunc->timerAllocate = zynqTimerAllocate;
pTimerFunc->timerRelease = zynqTimerRelease;
pTimerFunc->timerRolloverGet = zynqTimerRolloverGet;
pTimerFunc->timerCountGet = zynqTimerCountGet;
pTimerFunc->timerDisable = zynqTimerDisable;
pTimerFunc->timerEnable = zynqTimerEnable;
pTimerFunc->timerISRSet = zynqTimerISRSet;
最后调用 vxbTimerRegister (pTimerFunc);将定时器注册到定时器子系统,可以通过vxbTimerShow查看,针对此开发驱动,需要做一下工作:
第一:在定时器子系统中查找一个没有使用的,而且最适合自己的定时器使用,返回定时器的句柄。
LOCAL struct vxbTimerFunctionality * usrTimerInit(int timerNo)
{
struct vxbTimerFunctionality *pTimer = NULL;
if(timerNo >= TTC_TIMER_SUM)
return NULL;
pTimer = vxbTimerEval(usrTimer[timerNo].timerEvalFunc);
//printf("timer( point = %08x %s:%d)\n",pTimer,pTimer->timerName,pTimer->timerNo);
//pTimer1 = TIMERFUNC_TO_TIMERDATA (pTimer);
//printf("pTimer1 = %08x allocated = %d\n",pTimer1,pTimer1->timerFunc.allocated);
if(pTimer == NULL)
return NULL;
pTimer->timerRelease(pTimer);
//printf("ptimer = %08x\n",pTimer);
if ((pTimer->timerAllocate(pTimer,pTimer->features & VXB_TIMER_AUTO_RELOAD)) != OK)
{
printf("####callocate timer failed\n", 0, 1, 2, 3, 4, 5);
return NULL;
}
return pTimer;
}
第二:根据找到的句柄,初始化定时器,挂接中断服务例程
LOCAL STATUS usrTimerIntConnect(struct vxbTimerFunctionality *pTimer,FUNCPTR routine,_Vx_usr_arg_t arg)
{
ZYNQ_TIMER * pTimer1;
//printf("pTimer3 = %08x \n",pTimer);
if (pTimer == NULL)
return ERROR;
//pTimer1 = TIMERFUNC_TO_TIMERDATA (pTimer);
//printf("pTimer2 = %08x allocated = %d\n",pTimer1,pTimer1->timerFunc.allocated);
if (pTimer->timerISRSet (pTimer, (void(*)(_Vx_usr_arg_t))routine,arg) != OK)
return ERROR;
return (OK);
}
第三:设置定时器的中断周期
LOCAL STATUS usrTimerClkRateSet(struct vxbTimerFunctionality *pTimer,int ticksPerSecond)
{
if (pTimer == NULL)
return ERROR;
if ( ((UINT)ticksPerSecond < usrTtc0MinFreq) || ((UINT)ticksPerSecond > usrTtc0MaxFreq) )
return (ERROR);
if (pTimer->ticksPerSecond != (UINT)ticksPerSecond)
{
pTimer->ticksPerSecond = ticksPerSecond;
usrTimerDisable (pTimer);
usrTimerEnable (pTimer);
}
return (OK);
}
第四:使能定时器中断
LOCAL void usrTimerEnable(struct vxbTimerFunctionality *pTimer)
{
#ifndef _WRS_CONFIG_SMP
int key;
#endif /* !_WRS_CONFIG_SMP */
/* check if timer is available */
if (pTimer == NULL)
return;
#ifndef _WRS_CONFIG_SMP
key = intCpuLock ();
#endif /* !_WRS_CONFIG_SMP */
if(!vxbSmpClkRuning)
{
if (pTimer->timerEnable (pTimer,(pTimer->clkFrequency /pTimer->ticksPerSecond)) != OK)
{
#ifndef _WRS_CONFIG_SMP
intCpuUnlock (key);
#endif /* !_WRS_CONFIG_SMP */
return;
}
vxbSmpClkRuning = TRUE;
}
#ifndef _WRS_CONFIG_SMP
intCpuUnlock (key);
#endif /* !_WRS_CONFIG_SMP */
}
通过以上四步可以实现定时器的初始化及使用。